A team of biomedical, mechanical, and aerospace engineers from City University of Hong Kong and Hong Kong University of Science and Technology has developed a hopping robot by attaching a spring-loaded telescopic leg to the underside of a quadcopter. Their paper is published in the journal Science Robotics.
Quadcopters have become widely popular over the past several years for recreational use by the general public, a means of surveillance, and as a research tool—they allow for unprecedented aerial viewing and sometimes for carrying payloads.
Two features of the flying robots that are notably in need of improvement are flight time and payload capacity. In this new study, the researchers working in Hong Kong have devised a means to overcome both problems.
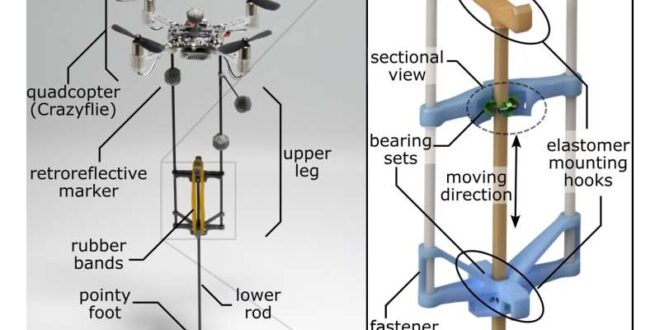
The approach they developed involved adding a spring-loaded telescopic leg (essentially a pogo stick) beneath a standard quadcopter, allowing it to hop when necessary. To allow the leg to work properly, the researchers also added stabilizing capabilities.
Adding the hopping ability reduced battery drain, allowing for longer flight times. It also allowed the quadcopter to lift much heavier loads because it did not have to keep them aloft.
The researchers found that the robot could hop around as desired, moving easily from one location to another. It could also take flight mid-hop and then fly as a normal quadcopter. Testing showed that in addition to clean vertical hops, the robot was capable of hopping on uneven ground and could even hop horizontally, which meant the leg could be used as a bumper of sorts, preventing damage if the robot ran into a wall or other structure.

The researchers describe their robot as being the size of a bird with a low weight, approximately 35 grams. Among possible applications, they suggest it could be used to monitor wildlife, for example, hopping among branches high in the trees. It could also be used in disaster areas, helping in assessments and finding survivors, or as farm monitors, hopping from plant to plant testing soil and moisture levels.
More information:
Songnan Bai et al, An agile monopedal hopping quadcopter with synergistic hybrid locomotion, Science Robotics (2024). DOI: 10.1126/scirobotics.adi8912
© 2024 Science X Network
Citation:
Adding a telescopic leg beneath a quadcopter to create a hopping drone (2024, April 11)
retrieved 11 April 2024
from https://techxplore.com/news/2024-04-adding-telescopic-leg-beneath-quadcopter.html
This document is subject to copyright. Apart from any fair dealing for the purpose of private study or research, no
part may be reproduced without the written permission. The content is provided for information purposes only.



